







در حالی که موتورهای الکتریکی متداول به طور مداوم کار می کنند و به عنوان منبع قدرت تحرک در ماشین آلات عمل می کنند ، سرو موتورها دارای یک مکانیسم کنترل هستند و قادر به چرخش با یک زاویه مشخص و توقف در موقعیت دقیق هستند. این قابلیت ها منجر به استفاده از آنها در کنترل تجهیزات در زمینه های متنوعی از صنعت و سرگرمی ها شده است ، از جمله کاربردها از موقعیت اتصالات در ربات های صنعتی گرفته تا کنترل زاویه سکان در هواپیماهای رادیو کنترل.
تعریف سرو موتور
اصطلاح “سروو” به مکانیزم کنترل اشاره دارد. از نظر فناوری ، مکانیزمی که کنترل را انجام می دهد “master” و مکانیزم تحت کنترل را “slave” می نامند. هر دو اصطلاح ، “servo” و “slave” از “servus” ، کلمه لاتین به معنی برده ، گرفته شده اند.
به عبارت دیگر ، سرو موتورها نام خود را از این واقعیت می گیرند که می توان به آنها اعتماد کرد “دقیقاً همانطور که دستور داده شده است” کار می کنند. هر موتور الکتریکی که قادر به کنترل پارامترهایی مانند موقعیت و سرعت باشد ، فارغ از چگونگی دستیابی به این کنترل ، سرووموتور نامیده می شود.
بر این اساس ، استفاده از این اصطلاح بعضاً شامل موتورهای پله ای و موتورهای بی هسته است. اما ، برای اهداف ما در اینجا ، یک موتور سروو به عنوان موتوری تعریف می شود که دارای رمزگذار (ردیاب حرکتی چرخشی) همراه با درایوری باشد که از اطلاعات این رمزگذار برای کنترل سرعت و موقعیت (زاویه چرخش) استفاده می کند.
تفاوت سرووموتورها با استپر موتورها
مانند موتورهای سروو ، موتورهای پله ای توانایی کنترل زاویه چرخش خود را بر اساس ورودی خارجی دارند و بنابراین می توانند از آنها برای موقعیت یابی ماشین آلات و برنامه های مشابه استفاده شود. با این حال ، این دو نوع موتور از جهات زیر با یکدیگر تفاوت دارند.
مکانیسم کنترل
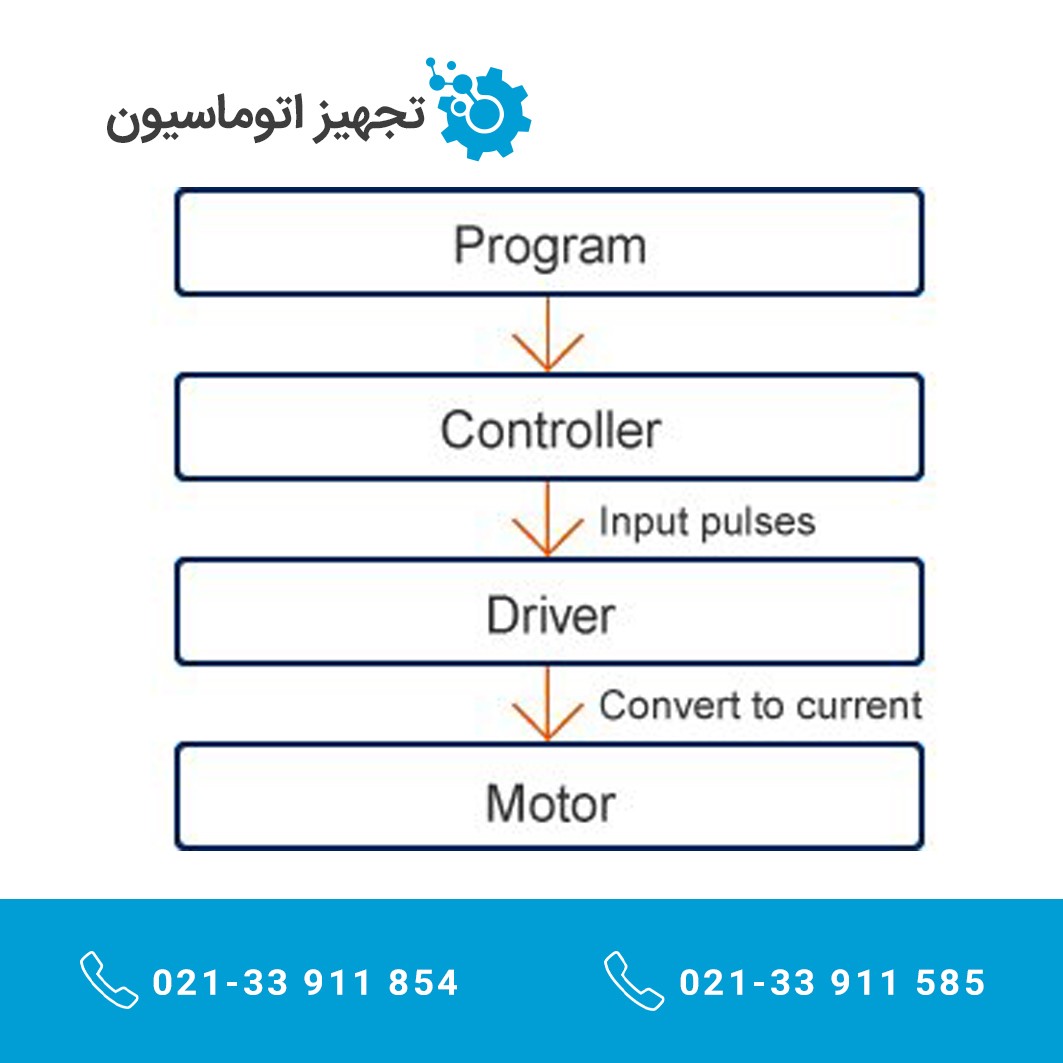
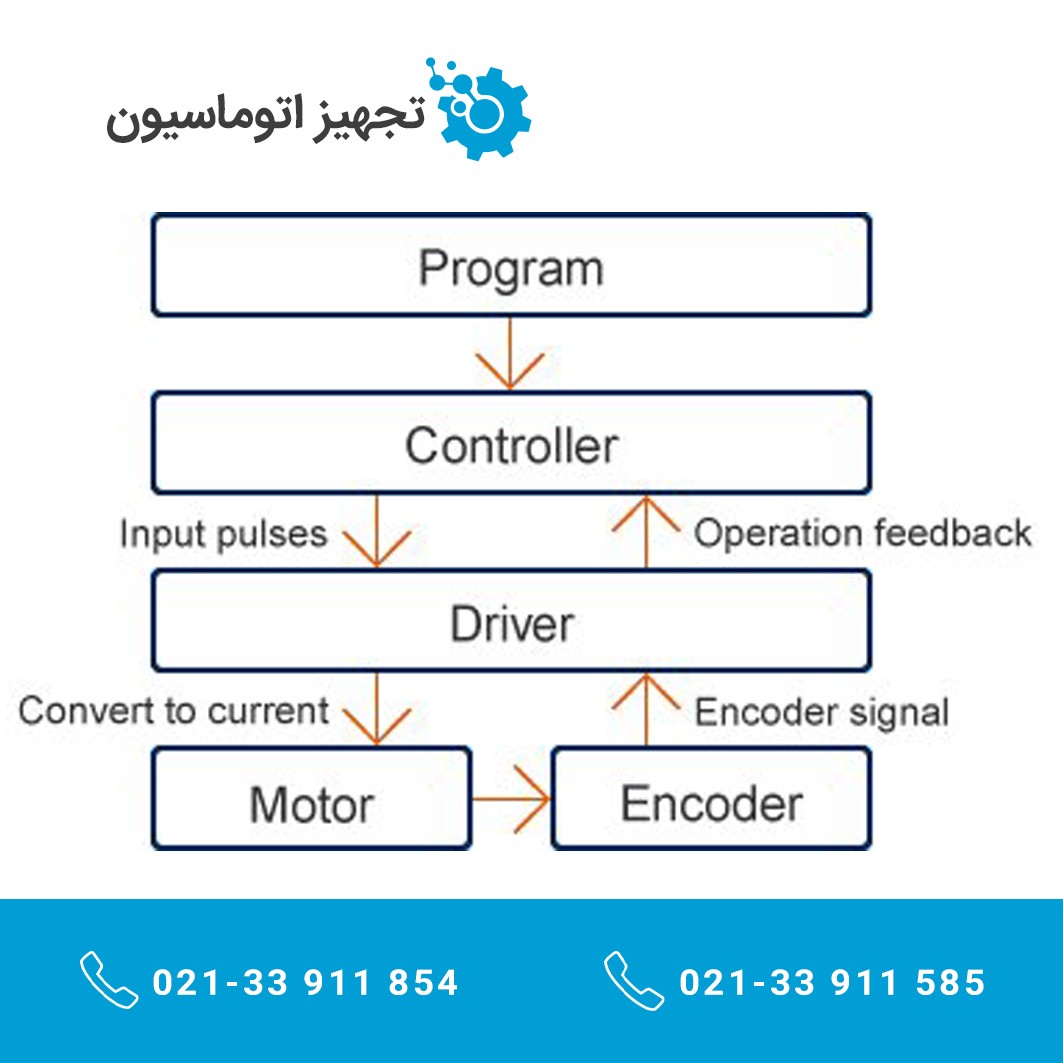
سرو موتورها دارای یک رمزگذار (ردیاب حرکتی چرخشی) هستند که می تواند موقعیت چرخشی آنها را تعیین کند و از این اطلاعات برای انجام کنترل بازخورد موقعیت موتور استفاده کند. این امر باعث ایجاد دقت در توقف دقیق و توانایی بازگشت به موقعیت اصلی خود می شود در صورت انحراف موقعیت موتور هنگام توقف. در مقابل ، برای موتورهای پله ای ، زاویه چرخش موتور متناسب با تعداد پالس های ورودی است. بر این اساس ، درایور موقعیت را بر اساس تعداد پالس های ورودی که از کنترل کننده دریافت می کند ، کنترل می کند. اگرچه این از نیاز به سنسور موقعیت جلوگیری می کند ، اما همچنین به این معنی است که راهی برای تشخیص انحراف موقعیت وجود ندارد. به عنوان مثال ، تغییرات غیرمنتظره بار می تواند منجر به خارج شدن موتور از همگام سازی شود (یعنی زاویه چرخش موتور با زاویه تعیین شده توسط ورودی آن متفاوت است).
Stepper motor
Servo motor
گشتاور و سرعت
سرو موتورها می توانند با سرعت بالا کار کنند و همچنین گشتاور قابل اطمینان را در محدوده سرعت گسترده ، از کم تا زیاد ارائه دهند. در حالی که موتورهای پله ای می توانند به ویژه گشتاور بالایی را در سرعت های پایین ارائه دهند ، گشتاور آنها با سرعت کاهش می یابد و بنابراین برای کار با سرعت بالا مناسب نیست.
هزینه
از آنجا که سرو موتورها به رمزگذار چرخشی و کنترل کننده سروو (درایور) نیاز دارند ، قیمت آنها از موتورهای پله ای بیشتر است.
تاریخچه سرو موتورها
فناوری سرو موتورها همراه با پیشرفت در ربات های صنعتی پیشرفت چشمگیری داشته است.
علاقه به اتوماسیون کارخانه از دهه 1950 در ایالات متحده شروع به رشد کرد ، در ابتدا مکانیسم هایی مانند نوار نقاله تسمه ای ، ماشین آلات اتوماتیک و روبات های صنعتی درگیر بودند. در حالی که ماشین آلات اتوماتیک اولیه و ربات های صنعتی تمایل به استفاده از هیدرولیک یا پنوماتیک برای کنترل موقعیت محرک داشتند ، آنها از نظر دقت ، قابلیت اطمینان عملکرد ، لوله کشی مربوطه و نشت مایع یا هیدرولیک هوا دارای مشکلاتی بودند.
پس از آن ، استفاده از سرو موتورهای DC در دهه 1950 و 60 با پیشرفت فن آوری رشد کرد و آنها به جای مکانیزم های هیدرولیکی و پنوماتیک دردسرساز ، در ربات های صنعتی مجهز شدند.
در همین حال ، سرو موتورهای متناوب در دهه 1980 ظهور کردند. از فواید عملی آنها می توان ربات ها را کوچکتر و سبک تر کرد و در نتیجه ، آنها هم اکنون بخش عمده ای از سرو موتورهای مورد استفاده در ماشین آلات مدرن صنعتی را تشکیل می دهند.
انواع سرو موتور
سرو موتورها را می توان در سرو موتورهای DC و سرو موتورهای گروهی دسته بندی کرد
سروو موتورهای DC
اینها سروو موتورهایی هستند که با موتور جریان مستقیم براش (DC) کار می کنند. اگرچه کنترل موتورهای DC نسبت به موتورهای AC آسان تر است و در گذشته به دلیل اندازه کوچک و هزینه پایین بسیار مورد استفاده قرار می گرفتند ، اما پیشرفت در فناوری کنترل موتور AC در چند وقت اخیر فرصت کمتری برای استفاده از آنها دیده است.
سروو موتورهای AC
اینها سروو موتورهایی هستند که با یک موتور جریان متناوب (AC) کار می کنند. اگرچه کنترل آنها از موتورهای DC پیچیده تر است ، اما پیشرفت در تکنولوژی کنترل آنها را قادر می سازد که متداول ترین نوع موتور سروو باشند.
بسته به مکانیسم محرک آنها ، سرو موتورهای AC را می توان به موتورهای همزمان (SM) و موتورهای القایی (IM) تقسیم کرد. تفاوت در این است که آیا آنها آهنربای دائمی دارند یا نه.
SM ها دارای یک آهنربا دائمی هستند. برای افزایش خروجی موتور ، میزان استفاده از آهنربای دائمی (که گران هستند) افزایش می یابد و در نتیجه هزینه بیشتری را برای آنها ایجاد می کند. به همین دلیل ، آنها به طور گسترده ای برای برنامه های کم مصرف (تا 10 کیلو وات) استفاده می شوند. با این وجود ، با ظهور آهنرباهای دائمی با کارایی بالا در سالهای اخیر ، اکنون موتورهای سروو AC همزمان گزینه پیش فرض هستند.
پیام های فوری از آهن ربا دائمی استفاده نمی کنند و تمایل دارند در برنامه های با خروجی بالاتر (10 کیلووات یا بیشتر) استفاده شوند.
کاربرد سروو موتور ها
با توجه به ویژگی موقعیت دقیق آنها ، سرو موتورها کاربردهای گسترده ای مانند ربات های صنعتی و ماشین آلات دقیق دارند. مثالهای کاربردی شامل موارد زیر است:
- اتصالات ربات انسان نما
- کنترل تجهیزات در دستگاه های بسته بندی
- درب های اتوماتیک در قطارها
- فیدرهای پرس / رول
- کنترل پرس ها
- کنترل ماشین های قالب پلاستیکی
- رادیو کنترل و سایر برنامه های سرگرمی
- چرخش ماشین آلات چرخش ال سی دی و نیمه هادی ها
- اتصالات ربات صنعتی
- کنترل تجهیزات در ماشین آلات پردازش مواد غذایی
- محرک های تسمه در سیستم های نوار نقاله
- جداول XY مورد استفاده در دستگاه های بازرسی LCD و نیمه هادی
- مراحل چرخش برای ابزار آلات یا سیستم های بازرسی
- کنترل ماشین های اتصال
- کنترل ماشین های سرگرمی
- دستگاه های پوشش یا رسوب بخار